Система имитационного моделирования бокового движения СВП
Для моделирования синтезированной системы стабилизации используются средства пакета инженерных прикладных программ MATLAB, а именно Control System toolbox и Guide User Interface [11], с помощью которых была разработана программа имитационного моделирования движения СВП (вид главного окна программы показан на рисунке 2).
Панель управления программы содержит следующие управляющие элементы:
· «Ввод параметров СВП» – панель (рис.3), предназначенная для ввода коэффициентов линеаризованной модели (2) бокового движения СВП, параметров балансировочного режима, параметров динамики рулевого привода и размаха неопределенности в виде значения параметра ![]() ;
;
· «Ввод параметров регулятора» – панель (рис. 4), предназначенная для ввода параметров управления. Здесь предусмотрено два варианта управления – «Робастный регулятор» – реализует робастный субоптимальный регулятор (9) и «ПИД-регулятор» – для реализует стандартный ПИД-регулятор с указанными параметрами по углу рыскания;
· «Ввод параметров возмущений» – панель (рис. 5), предназначенная для ввода параметров внешних возмущений (скорость ветра, сила и момент от морского волнения);
· «Моделирование» – моделирование системы с заданными параметрами;
· «Выход» – завершение работы программы.
Панель результатов представляет собой графическое окно (рис.2) с выплывающим контекстным меню, предназначенным для выбора параметров движения, осциллограммы которых необходимо построить. Предусмотрен вывод курсового угла ![]() , град, угла дрейфа
, град, угла дрейфа ![]() , град, путевого угла
, град, путевого угла ![]() , град, угловой скорости рыскания
, град, угловой скорости рыскания ![]() , град/с, скорости движения
, град/с, скорости движения ![]() , м/с, перемещения (циркуляции)
, м/с, перемещения (циркуляции) ![]() , м, угла перекладки аэроруля
, м, угла перекладки аэроруля ![]() , град. Кроме того в программе предусмотрена возможность визуализации бокового движения СВП с помощью средств Virtual Reality Toolbox пакета MATLAB. Графическое окно блока визуализации показано на рисунке 6.
, град. Кроме того в программе предусмотрена возможность визуализации бокового движения СВП с помощью средств Virtual Reality Toolbox пакета MATLAB. Графическое окно блока визуализации показано на рисунке 6.

Рисунок 2 – Главное окно программы моделирования

Рисунок 3 – Панель ввода параметров модели СВП
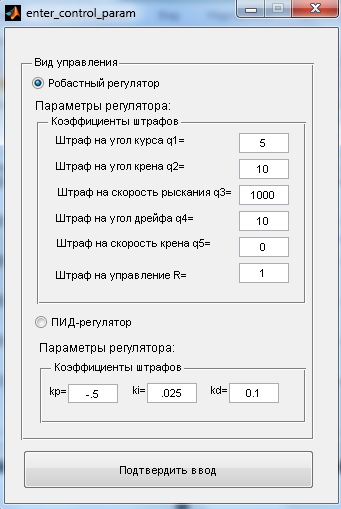
Рисунок 4 – Панель ввода параметров управления
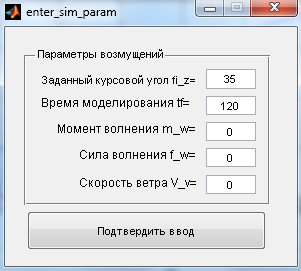
Рисунок 5 – Панель ввода параметров возмущений
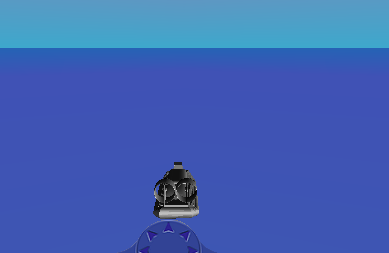
Рисунок 6 – Графическое окно визуализации движения СВП
Навигация
- Главная
- Двигатели внутреннего сгорания
- Компания Mazda
- Поршневые двигатели внутреннего сгорания
- Судовой двигатель внутреннего сгорания
- Автомобильные эксплуатационные материалы
- Транспортные характеристики грузов
- Транспорт