Результаты моделирования системы стабилизации
Для моделирования синтезированной робастной системы стабилизации в качестве численных значений коэффициентов линеаризованной модели бокового движения (4) возьмем данные для СВП массой ![]() , кг, длиной
, кг, длиной ![]() , м, шириной
, м, шириной ![]() , м, площадью подушки
, м, площадью подушки ![]() , м, скоростью хода
, м, скоростью хода ![]() , м/с [3]:
, м/с [3]:
Параметры балансировочного режима выберем такими:
![]() ,
, ![]() ,
, ![]() ,
, ![]() .
.
Параметры рулевого тракта:
- зона нечувтсивтельности 0,5 град;
- постоянная времени аэроруля 5 с;
- максимальный угол отклонения аэроруля 35 град.
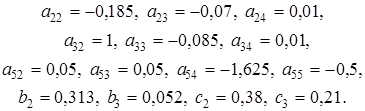
Коэффициенты штрафа критериев качества:
![]()
Осциллограммы угла рыскания, угла дрейф, угла кренаа и угла отклонения аэроруля системы с ПИД-регулятором и с робастным регулятором при номинальных параметрах (т.е. ![]() ) показаны на рисунке 6. Из графиков видно, что за две минуты оба регулятора приводят курсовой угол СВП в заданное положение (
) показаны на рисунке 6. Из графиков видно, что за две минуты оба регулятора приводят курсовой угол СВП в заданное положение (![]() град), при этом угол дрейфа не достигает критических значений приводимых к опрокидыванию, угол аэроруля изменяется в конструктивно допустимых пределах.
град), при этом угол дрейфа не достигает критических значений приводимых к опрокидыванию, угол аэроруля изменяется в конструктивно допустимых пределах.
Теперь продемонстрируем как сохраняются робастные свойства системы при уменьшении параметров в 100 раз, т.е. в программе моделирования выбираем ![]() .Такое изменение параметров модели на практике может соответствовать увеличению массы судна и т.п. Результаты моделирования системы с робастным регулятором и с ПИД-регулятором (регуляторы настроены по номинальными параметрам, без учета
.Такое изменение параметров модели на практике может соответствовать увеличению массы судна и т.п. Результаты моделирования системы с робастным регулятором и с ПИД-регулятором (регуляторы настроены по номинальными параметрам, без учета ![]() ) показаны на рисунке 7, откуда видно, что робастный регулятор по-прежнему обеспечивает стабилизацию курсового угла (с перерегулированием примерно 16%) и приемлемое значение дрейфа, а вот ПИД-регулятор уже не дает приемлемое качество стабилизации.
) показаны на рисунке 7, откуда видно, что робастный регулятор по-прежнему обеспечивает стабилизацию курсового угла (с перерегулированием примерно 16%) и приемлемое значение дрейфа, а вот ПИД-регулятор уже не дает приемлемое качество стабилизации.

Рисунок 6 – результаты моделирования.

Рисунок 7 – результаты моделирования.
Робастный подход к задаче построения системы стабилизации бокового движения СВП позволяет синтезировать закон управления, обеспечивающий гарантированное качество процесса стабилизации при изменении параметров движения судна, которое может быть связано со спецификой функционирования, в частности, полезная загрузка судна может существенно изменяться и, следовательно, будут изменяться и его параметры (масса, момент инерции). Показано, что использование классических ПИД-регуляторов в контуре стабилизации не дает гарантированного результата при наличии неопределенности.
Навигация
- Главная
- Двигатели внутреннего сгорания
- Компания Mazda
- Поршневые двигатели внутреннего сгорания
- Судовой двигатель внутреннего сгорания
- Автомобильные эксплуатационные материалы
- Транспортные характеристики грузов
- Транспорт