Основы построения систем. Способы передачи и анализ телемеханических сигналов
В зависимости от назначения передаваемой информации принято различать телемеханические системы телеуправления (ТУ), телесигнализации (ТС) и телеизмерения (ТИ) (рис. 5.)
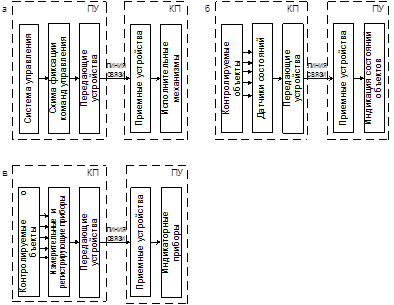
Рис.5. Структурные схемы систем телеуправления (а). телесигнализации (б) и телеизмерения (в)
Практически любая система телемеханики представляет собой определенную комбинацию перечисленных устройств. На железнодорожном транспорте для диспетчерского управления наибольшее распространение получили системы ТУ-ТС. В последнее время для диагностирования состояния устройств они стали дополняться и аппаратурой ТИ, т.е. приобретают структуру ТУ-ТС-ТИ.
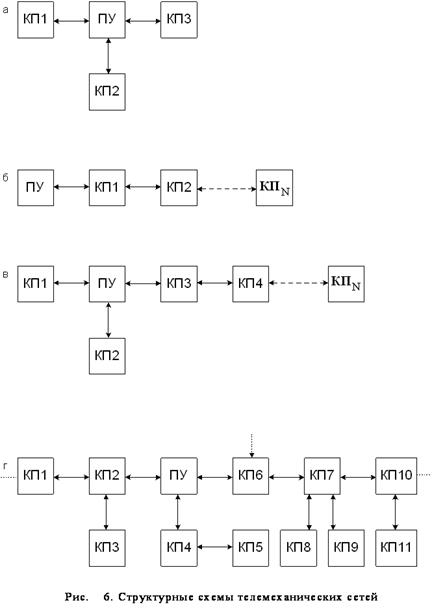
Территориально объекты системы телемеханики могут быть разно размещены относительно пункта управления. Поэтому телемеханическая сеть - совокупность устройств телемеханики и объединяющих их каналов связи - выполняется по радиальной (рис. 6,а), цепочечной (рис. 6, б) или радиально-цепочечной (рис. 6, в) структуре. На железнодорожном транспорте эти структуры наиболее распространены, хотя возможна реализация и более сложных древовидных структур (рис. 6, г).
Системы телемеханики любой структуры реализуются с использованием линий связи, в качестве которых может выступать та или иная физическая среда, способная передавать сигналы. В современных системах телемеханики чаще всего применяются проводные линии (выделенные или совмещенные с энергоснабжением), радиопункты и световодные линии.
По любой линии связи может быть организовано определенное число каналов для независимой передачи сообщений. При передаче сигналов телемеханики такой канал принято называть телемеханическим.
Телемеханические каналы являются средством объединения в систему источника и получателя сообщений.
Источники информации разнообразны, рассредоточены в пространстве, могут иметь детерминированное и неопределенное число состояний. Соответственно и организация устройств телемеханики различна для сосредоточенных и рассредоточенных объектов, для отражения их дискретного или непрерывного множества состояний. Любое изменение внутреннего состояния объектов контроля принято считать событием. О каждом событии контролирующий пункт должен получить сообщение.
Сообщение, порожденное событием на передающем конце, должно быть, определенным образом доставлено получателю. Передача сообщений в системах телемеханики происходит по каналам связи, где в роли переносчика сообщений выступает переменный или постоянный ток. Поэтому переносчик с нанесенным на него сообщением уже представляет собой сигнал. Разумеется, что каждое сообщение образует свой собственный сигнал, отличный от других. Это необходимо для различения сообщений на приемном конце по виду сигналов.
Для упрощения процедур организации сигналов и выделения из них сообщений стремятся использовать ограниченное число признаков переносчика. Если число сообщений превышает число используемых признаков, каждому сообщению соответствует сложный сигнал, состоящий из определенной совокупности этих признаков, используемых на определенных интервалах времени.
Интервал времени, в течение которого признак переносчика не меняется, называют импульсом сложного сигнала, а используемые характеристики переносчика — импульсными признаками.
Любой сложный сигнал на приемном конце может быть правильно понят, если будет выделен каждый импульс сигнала и произойдет запоминание его качества (т.е. импульсного признака) на время, достаточное для определения известных приемнику свойств всей совокупности импульсов сложного сигнала. Каждой такой совокупности импульсов сложного сигнала соответствует вполне определенное сообщение. Поэтому, если правильно принят сложный сигнал, правильно будет понято переданное сообщение. Процесс образования сложного сигнала, соответствующего определенному сообщению, называют кодированием, а обратные преобразования на приемном конце — декодированием.
Навигация
- Главная
- Двигатели внутреннего сгорания
- Компания Mazda
- Поршневые двигатели внутреннего сгорания
- Судовой двигатель внутреннего сгорания
- Автомобильные эксплуатационные материалы
- Транспортные характеристики грузов
- Транспорт